
“안녕하세요. 김병선 책임님! 인터뷰에 응해주셔서 감사합니다.
소속팀과 진행하시는 업무 관련하여 간단한 소개 부탁드릴게요”
.jpg&blockId=c6a027bf-ad43-48b2-8fbb-5f6156a112cf)
ㄴ이천필드에서 로우데이터 수집중인 김병선 파트장
안녕하세요. 긴트 소프트웨어팀 김병선입니다. 반갑습니다.
소프트웨어팀은 크게 보면 ‘ASW, BSW 파트로 나눠져있고 전 ASW(자율주행+전장) 파트장을 맡고 있습니다.
현재 플루바오토 프로젝트 개발을 리딩하고 있으며 제품은 올해 출시되었지만 성능 향상과 소프트웨어부분을 버전업 하고자 계속해서 이천필드에서 테스트 하고 있습니다.
소프트웨어팀은 크게 보면 ‘ASW, BSW 파트로 나눠져있고 전 ASW(자율주행+전장) 파트장을 맡고 있습니다.
현재 플루바오토 프로젝트 개발을 리딩하고 있으며 제품은 올해 출시되었지만 성능 향상과 소프트웨어부분을 버전업 하고자 계속해서 이천필드에서 테스트 하고 있습니다. ”오늘은 이천필드에서 뵙네요.
트랙터가 몇대 보이는데 어떤 업무차 이천에 오신건가요?”
오늘은 올해 출시됐던 플루바오토 기능을 고도화하기 위해 왔어요.
기능을 고도화하기 위해서는 시뮬레이션이 필요한데 시나리오 케이스나 로우데이터 수집이 필요합니다. 로그수집 작업이 끝나면 사용하고 있는 시험용 트랙터에 정비가 필요한 부분을 최종적으로 점검하러 왔습니다.
팀에 최근 합류하게 되신분들이 계셔서 테스트장에 좀 더 신경써야 할 부분도 체크하고 실제 테스트 되고 있는 현장을 보여주려고 함께 왔습니다.
.jpg&blockId=28d75fa3-33a8-4f00-aa26-7e48bd303101)
ㄴ 임동현 주임과 최근 합류한 김창희 선임
“자세히 보니 플루바오토가 부착되어 있네요.
잘 모르시는 분들을 위해 자율주행 트랙터와 자율주행 키트의 차이에 대한 설명 부탁드려요.”
자율주행 트랙터의 경우 사람이 운전조작을 하지 않고 자율적으로 주행경로를 생성하고 그 주행경로를 추적경로하는것을 의미해요.
저희 자율주행 키트는 사람이 직접 운전하는 경로의 트랙터를 부착해서 수동식 트랙터를 자율주행화 하기 위한 키트입니다.
자율주행 트랙터의 경우 최소 1억 이상의 가격에 미국이나 중국 등 대규모 농사를 짓는 농민들이 보통 사용해요. 한국의 경우 소규모 농작을 주로 하고 비용적인 측면이 농민에게 상당히 부담스럽죠. 대부분 수동식 농기계를 사용하고 있는데 저렴한 비용으로 농민들의 부담을 덜어주고 편한 농작업을 돕도록 키트를 개발했고 현재도 계속 농민들의 편의성을 생각해 기능적인 부분의 소프트웨어를 향상 시키고 있습니다.
”총 4개의 제품으로 키트가 구성되어 있는거죠 ?
제품별로 간단한 설명 부탁드려요.”
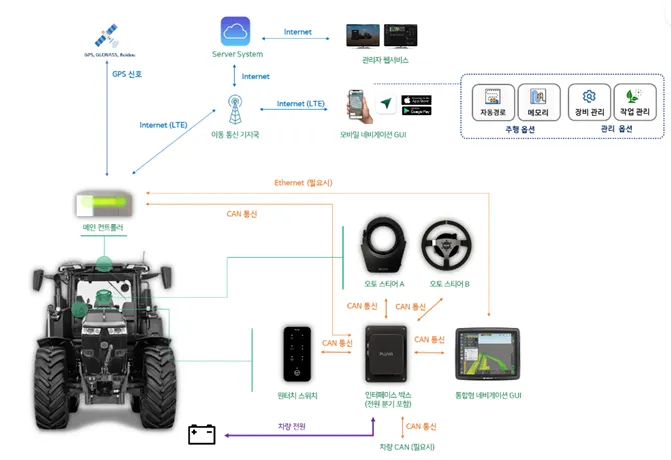
제품영상이나 소개에서도 알 수 있듯이 플루바오토는 총 4가지 구성품으로 이루어져 있습니다. 메인컨트롤러, 인터페이스 박스, 원터치 스위치 박스, 스티어링으로 구성되어 있고요.
메인컨트롤러 같은 경우 개발자들 사이에서는 단말기라고 부르고 있습니다. GPS를 수신해서 차량자세 측정, 부착되어 있는 농기계의 위치도 알려주고 경로를 따라가기 위한 명령을 생성합니다.
인터페이스 박스는 구성품간의 통신을 지원하기 위한 허브 장치로 전원 연결, 외부 단자 등을 연결할 수 있는 장비입니다.
원터치 스위치 박스는 작은 리모컨 형태로 자율주행을 제어하기 위한 장치에요. 원터치 스위치를 통해 직관적으로 자율주행을 조작할 수 있죠.
스티어링은 농기계에 따라 2가지 형태로 생선된 주행경로를 추종하기 위해 필요합니다. 기존 농기계의 핸들에 부착 또는 교체하여 농기계의 스티어링을 대체하고 있어요.
농민분들이 트랙터 한대만 사용하는게 아니라 보통 트랙터, 이앙기, 콤바인 등 다양한 농기계를 사용중인데요. 플루바오토 키트를 구매했다면 메인컨트롤러를 다른 농기계에 부착 후 나머지 구성품만 구매해 다른 농기계에도 사용이 가능합니다.
”자세한 설명 감사합니다. 플루바오토의 큰 장점 중 하나가 정밀작업으로 알고 있는데요.
그렇다면 정밀작업이 가능한 긴트만의 특별한 기술력이 있을까요?”
플루바오토에는 플랫폼, 모바일 통신, 센싱, 제어, 정밀 측위 같은 여러분야의 기술이 정교하게 구현되어 있어요. 이러한 기술들이 서로 융합되어 정밀작업을 수행하고 있답니다.
정밀 측위의 경우 저희는 RTK-GPS를 사용하고 있어요. Real Time Kinematic - Global Positinoning System의 약자로 실시간 이동 측위 위치 정보 시스템을 말해요.
흔히 자동차에서 사용하는 일반적인 GPS는 전리권/대기권/위성오차 등의 이유로 적게는 50cm에서 많게는 수백 미터 측위 오차가 발생합니다.
플루바오토는 KT LTE 기반 네트워크 RTK 기술을 이용하여 국토정보플랫폼으로부터 현재 위치에 대한 보정정보를 주기적으로 수신하고, 수신된 보정정보를 바탕으로 오차범위 1~2cm 수준의 실시간 정밀 측위가 가능해 보다 정밀 작업을 할 수 있죠.
정밀 작업이 중요한게 농민이 두둑작업을 할 때 수동작업을 할때 보다 골이 하나 더 나올 수도 있어 농지도 효율적으로 사용하고 이윤도 더 창출 할 수 있죠.
<참고>
이랑 : 밭의 경우 작물을 심는 곳
고랑 : 이랑과 이랑 사이에 이랑 작업을 위해 폭 30cm정도와 깊이를 두는 것
두둑 : 고랑의 깊이에서 이랑의 표면까지의 높이

”정밀 측위가 가능한 기술이 RTK-GPS를 사용하고 있어서 였군요.
이 외에도 자랑할만한 부분이 있을까요?”
플루바 오토에 들어간 기술력도 자랑할만한 부분이지만 전 연구진들을 자랑하고 싶어요.
제가 프로젝트를 리딩하고 있지만 함께 개발하는 동료들도 각 분야의 전문성과 노하우를 가지고 계셔서 제가 많이 배우면서 하고 있습니다.
함께 일하고 있는 SW팀 동료들은 다들 각자 맡은 역할을 너무 잘 해주고 계시고요.
제품을 개발할때 HW팀과 생산설계보증팀과도 유기적으로 소통하고 있습니다.
HW팀에서 제품의 PCB부터 회로설계까지 소프트웨어를 제외한 실물을 설계해주셨구요.
생산설계보증팀에서 기구설계와 제품이 실제로 양산되는 과정까지 책임져주고 계십니다.
”제품이 출시됐는데 이천필드에서 계속 테스트 진행중인걸 보면 아직 개선할 부분이나 농민들의 피드백이 있는 것 같아요.”
B2C사업팀에서 딜러사나 농민들과 소통하고 있는데요. 예상보다 농민들이 관심을 많이 주셔서 여러가지 고민을 하고 있는 단계입니다. 가끔 생각치도 못했던 부분의 질문도 있어 연구테마가 될 수 있는 부분도 있고요.(내용은 아직은 개발 진행중인 사항이라 대외비입니다. 하하.)
경작지 환경에 따라 다양한 케이스가 많이 있어요. 날씨나 토양상태에 따라 이슈들도 있고요. 그렇다보니 새로운 케이스가 발견될때 마다 분석 후 테스트를 진행하고 있습니다.
”마지막으로, 플루바오토의 추가될 기능이나 가능하게 만들고 싶은 기능이 있을까요?”
현재도 경로 생성이 가능하지만 논, 밭의 특수한 상황들이 많은데 그에 맞춰 다양한 작업지 현장을 고려해 농민들이 편하게 작업할 수 있는 최적의 경로를 생성하고 싶어요.
최근에 준비하고 있는건 해외사업팀 윤이사님이 인도네시아 수출 관련해서 협의중이세요. 동남아에서 주로 사용하는 소형 농기계에도 버그 없이 잘 사용할 수 있게 테스트를 더 해보고 언어 현지화를 지원하기 위해 메인컨트롤러도 관련된 기능들을 준비하고 있습니다.
개인적으로는 플루바오토앱으로만 알아서 농작업이 가능한 완전 무인화된 트랙터를 만들어보고 싶어요.
앞으로도 다양한 프로젝트에 도전할 예정이니 많은 관심 부탁드립니다.
앞으로도 다양한 프로젝트에 도전할 예정이니 많은 관심 부탁드립니다.인터뷰 응해주셔서 감사합니다. 멋진 도전 응원하고 또 좋은 소식으로 찾아뵙겠습니다.